Saludos,
tras un verano de pocas vacaciones no he tenido mucho tiempo
de subir cosas, tanto de rol, comics o electrónica. Así que iniciando este
nuevo año escolar, vamos a ver si tenemos mejor ritmo. Hoy vengo hablaros de
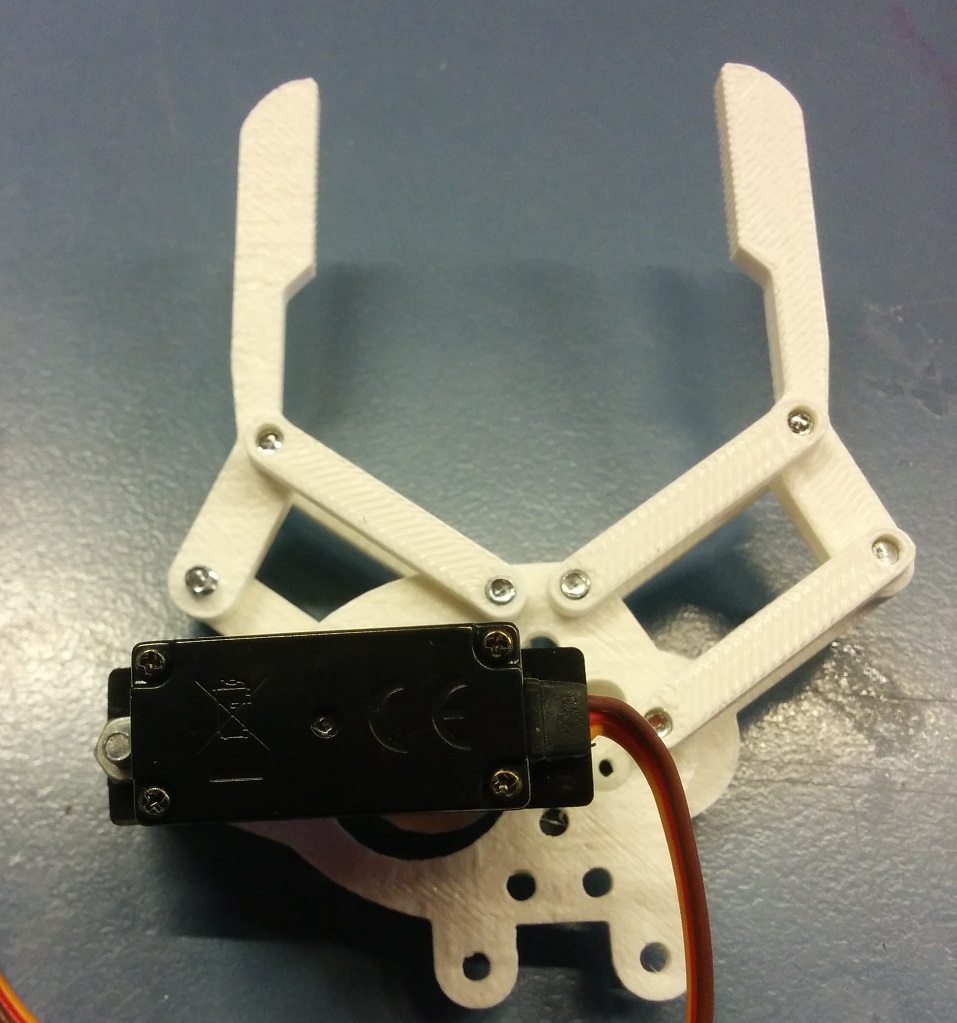
algo sencillo un gripper,
o unas pinzas robóticas para vuestros proyectos.

Hay muchos y de muchos tipos, ¿Que vengo a aportar?
Pues bien desde hace tiempo empleamos este tipo de gripper,
con un servo, bueno no uno sino varios son los que hemos probado con diferentes
resultado. Los que son muy pequeños se rompen con facilidad y los que son algo
más grande me dan problemas con la alimentación, exigen mucho a la fuente y
normalmente me hacen descender la tensión en el robot. Por ello quería hacer un
gripper controlado con un Micro
Metal GearMotor, su consumo es muy bajo y podría instalarse en la mayoría
de robots, ya que solo necesita de 3v para funcionar.
 |
 |
| Gripper con servo | Gripper con Micro Metal motorGear |
En la segunda imagen
se muestra un motor con eje para encoder, de esta forma podríamos saber la posición
en que esta, pero complicaría innecesariamente algo simple, normalmente empleo
el DFR0429
que es un micrometal con driver que permite controlarse de la misma forma que
un servo. Si bien no tendremos control de la posición bien se puede añadir un
microruptor en la pinza y hacer una abertura temporizada.
Pero esto es casi lo mismo de siempre, así que intente crear
un gripper que me llevase menos trabajo montarlo. Antes de las vacaciones
estuve probando un sistema con tendones y pese a funcionar no me ahorraba
trabajo.
 |
 |
| Prototipo de gripper con tendones. | |
Asi que volví al
modelo tradicional he trate de reducir en número de tornillos que emplear haciendo
que las pinzas salieran en una sola pieza.
 |
 |
| Para imprimirla le hice los soportes, fáciles de quitar. | |
Y para no alargarme más aquí lo podéis descargar.
Anakleto.
No hay comentarios:
Publicar un comentario